DisFor decades, robots were narrowly specialized, mainly performing repetitive tasks in structured factory environments. Today, AI is transforming robotics - enabling robots to interpret and execute user instructions and adapt to dynamic environments.
We are entering a new era of rapid growth: Citi estimates that 1.3 billion robots will be deployed globally by 2035, expanding beyond factories into homes and service industries. Meanwhile, Morgan Stanley projects that the humanoid robotics market alone could reach $5 trillion by 2050.
While this rapid expansion unlocks immense market potential, it also brings significant challenges around centralization, trust, privacy and scalability. Web3 technologies offer transformative solutions by enabling decentralized, verifiable, privacy-preserving, and collaborative robotic networks that directly address these issues.
In this edition, we’ll explore the evolving AI robotics value chain, with a special focus on humanoid robots, and uncover compelling opportunities arising from the convergence of AI robotics, and Web3 technologies.
AI Robotics Value Chain
The AI robotics value chain consists of four essential layers: Hardware, Intelligence, Data, and Agent. Each layer builds upon the others, enabling robots to perceive, reason, and act within complex real-world environments.
In recent years, significant progress has been made in the hardware layer, led by industry pioneers such as Unitree and Figure AI. However, key challenges persist in the non-hardware layers—specifically, limited high-quality datasets, a lack of generalizable foundation models, poor cross-embodiment interoperability, and the need for reliable edge computing. As a result, the greatest opportunities for advancement now lie within the Intelligence, Data, and Agent layers.
Hardware Layer: “The Body”
Today, modern “robot bodies” are easier than ever to build and deploy. There are now more than 100 different types of humanoid robots on the market, including Tesla’s Optimus, Unitree’s G1, Agility Robotics’ Digit, and Figure AI’s Figure 02.
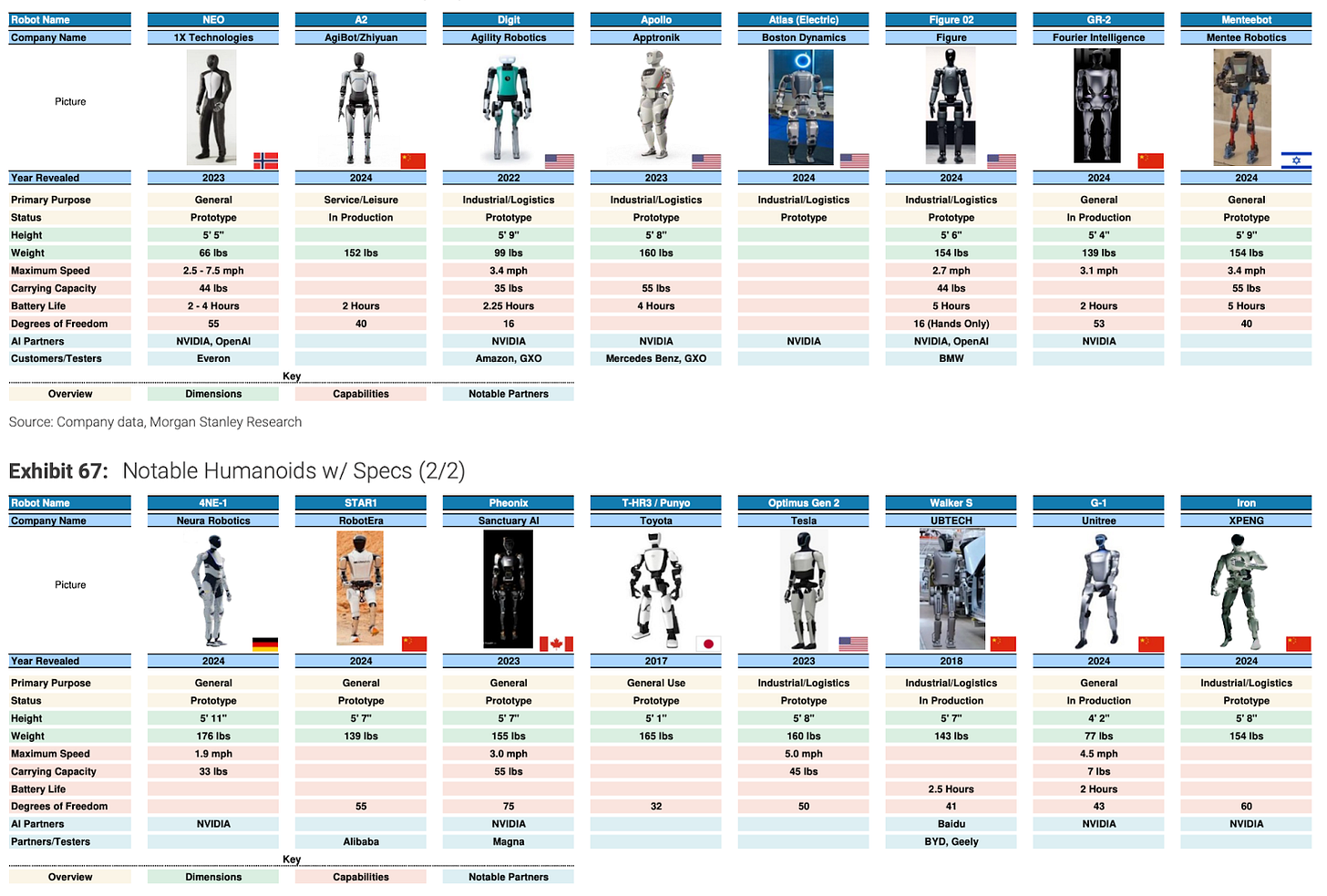
Source: Morgan Stanley, The Humanoid 100: Mapping the Humanoid Robot Value Chain.
This progress is driven by advancements across three key components:
- Actuators: Acting as the “muscles” of robots, actuators convert digital commands into precise movements. Innovations—such as high-performance electric motors for rapid, accurate motion and Dielectric Elastomer Actuators (DEAs) for delicate tasks—have significantly improved dexterity. This is evident in robots like Tesla’s Optimus Gen 2, with 22 degrees of freedom (DoF), and Unitree’s G1, both demonstrating near-human dexterity and impressive mobility.
Source: Unitree’s latest humanoid robots staging a boxing match at WAIC 2025
Sensors: Advanced sensors enable robots to perceive and interpret their environment through vision, LIDAR/RADAR, tactile, and audio inputs. These technologies support safe navigation, precise manipulation, and situational awareness.
Embedded Computing: On-device CPUs, GPUs, and AI accelerators (such as TPUs and NPUs) process sensor data in real time and run AI models for autonomous decision-making. Reliable, low-latency connectivity ensures seamless coordination, while hybrid edge–cloud architectures allow robots to offload intensive computations as needed.
Intelligence Layer: “The Brain”
While hardware matures, the focus shifts to building the “robot brain”: robust foundation models and advanced control policies.
Before AI integration, robots relied on rule-based automation with pre-programmed motions and lacked adaptive intelligence.
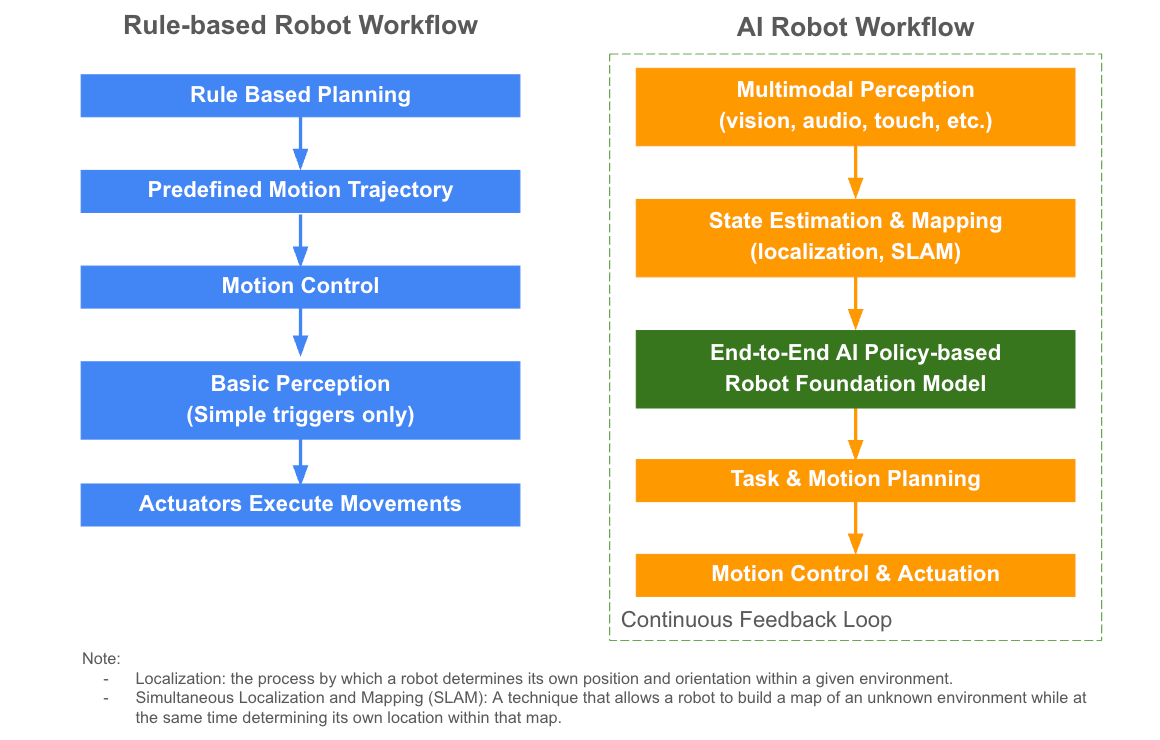
Foundation models are now being introduced into robotics. However, general-purpose large language models (LLMs) alone are not sufficient, as robots must perceive, reason, and act in dynamic physical environments. To meet these needs, the industry is developing end-to-end, policy-based robotic foundation models. With these models, robots can:
- Perceive: Ingest diverse, raw, multimodal sensor data (vision, audio, touch)
- Plan: Estimate their own state, map the environment, and interpret complex instructions—mapping perception directly to action with minimal manual engineering
Act: Generate motion plans and output control commands for real-time execution
These models learn general “policies” for interacting with the world, enabling robots to adapt to a wide range of tasks and operate with greater intelligence and autonomy. Advanced models also use continuous feedback, allowing robots to learn from experience and further enhance adaptability in dynamic environments.
The leading foundational architecture for robotic foundation models today is the Vision-Language-Action Model (VLA). VLA models map sensory inputs—primarily visual data and natural language instructions—directly to robot actions, enabling robots to respond to what they “see” and “hear” with appropriate control commands. Notable examples include Google’s RT-2 and NVIDIA’s Isaac GR00T N1, π0 by Physical Intelligence (π).
To enhance these models, multiple complementary approaches are often integrated, such as:
World Models: Build internal simulations of the physical environment to help robots learn complex behaviors, predict outcomes, plan actions. Notably, Google recently launched Genie 3, a general purpose world model that can generate an unprecedented diversity of interactive environments.
- Deep Reinforcement Learning: Help robots learn behaviors through trial and error.
- Teleoperation: Allow remote control and provide training data.
Learning from Demonstration (LfD) / Imitation Learning: Teach robots new skills by mimicking human actions.
Below is a high-level illustration of how these approaches contribute to robotic foundation models.
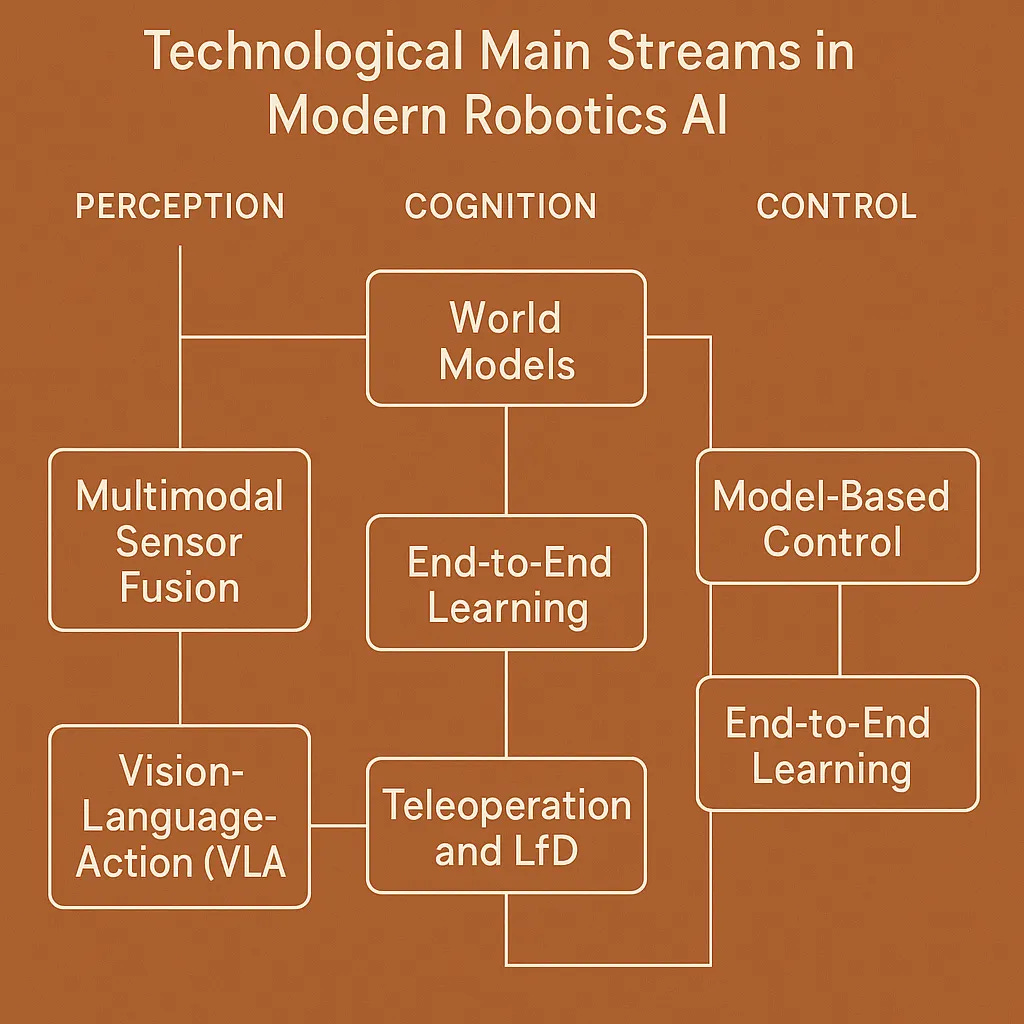
Source: World models: the physical intelligence core driving us toward AGI
Recent open-source breakthroughs - such as π0 by Physical Intelligence (π) and NVIDIA’s Isaac GR00T N1 - mark significant progress in the field. However, most robotic foundation models remain centralized and closed-source. Companies like Covariant, Tesla, and others continue to retain proprietary code and datasets, largely due to limited incentives for openness.
This lack of transparency stifles collaboration and interoperability across robotic platforms - highlighting the need for secure and transparent model sharing, community-governed on-chain standards, cross-embodiment interoperability layer. Such an approach would foster trust, cooperation, and more robust development in the field.
Data Layer: The “Knowledge” for the Brain
Robust robotics datasets depend on three pillars: quantity, quality, and diversity.
Despite ongoing efforts, current robotics datasets are vastly insufficient in scale. For example, OpenAI’s GPT-3 was trained on 300 billion tokens, whereas the largest open-source robotics dataset—Open X-Embodiment—contains just over 1 million real robot trajectories across 22 robot types. This is several orders of magnitude smaller than what is needed for robust generalization.
Proprietary approaches—such as Tesla’s use of data factories, where workers wear motion-capture suits to generate training data—can help collect more real-world motion data. However, these methods remain costly, limited in diversity, and challenging to scale.
To address these challenges, the robotics field is leveraging three main data sources:
- Internet Data: Vast and easily scalable, but primarily observational and lacking sensorimotor signals. Pre-training large vision-language models (like GPT-4V and Gemini) on internet data provides valuable semantic and visual priors. Additionally, annotating videos with kinematic labels can transform raw footage into actionable training data.
- Synthetic Data: Generated via simulation, synthetic data enables rapid, large-scale experimentation and diverse scenarios, but can’t fully capture real-world complexity—a limitation known as the sim-to-real gap. Researchers address this using domain adaptation (e.g., data augmentation, domain randomization, adversarial learning) and sim-to-real transfer, iteratively refining models with real-world testing and fine-tuning.
Real-World Data: Although scarce and expensive, real-world data is essential for grounding models and bridging the gap between simulation and deployment. High-quality data typically includes egocentric (first-person) views—capturing what the robot “sees” during tasks—and motion data, recording its precise actions. Motion data is often collected through human demonstrations or teleoperation using VR, motion capture devices, or kinesthetic teaching, ensuring models learn from accurate, real-world examples.
Research shows that combining internet, real-world, and synthetic data sources into robot training can significantly enhance training efficiency and model robustness compared to relying on any single source.
Meanwhile, while increasing data quantity helps, diversity is even more important - especially for generalizing to new tasks and robot embodiments. Achieving this diversity requires open data platforms and collaborative data sharing, including the creation of cross-embodiment datasets that support a wide range of robots and enable stronger foundational models.
Agent Layer: The “Physical AI Agent”
The move toward physical AI agents—autonomous robots acting in the real world—is accelerating. Advancements here depend on fine-tuned models, continual learning, and real-world adaptation tailored to each robot’s unique embodiment.
Several emerging opportunities to accelerate the advancement of physical AI agents:
- Continual learning and adaptive infrastructure: Systems that enable robots to continuously improve through real-time feedback loop and shared experiences during deployment
- Autonomous agent economies: Robots operating as independent economic agents—trading resources like compute and sensor data in robot-to-robot marketplaces and generating revenue through tokenized service
- Multi-agent systems: Next-generation platforms and algorithms that enable fleets of robots to coordinate, collaborate, and optimize collective behavior
The Convergence of AI Robotics and Web3: Unlocking a Massive Market
As AI robotics move from research to real-world deployment, several entrenched bottlenecks—centralized data/model silos, trust and provenance gaps, privacy and compliance constraints, and poor interoperability—are impeding innovation and limiting scalable, robust, and economically viable robotics ecosystems.
Pain Points in AI Robotics
Centralized Data & Model Silos
Robotics models need vast, diverse datasets. Today’s data and model development are centralized, fragmented, and costly, resulting in siloed, less adaptable systems. Robots deployed in dynamic real-world settings often underperform due to a lack of data diversity and limited model robustness.
Trust, Provenance, and Reliability
The absence of transparent and auditable records for data origins, model training, and robot operation undermines trust and accountability—key barriers for user, regulator, and enterprise adoption.
Privacy, Security, and Compliance
Sensitive applications—such as healthcare and home robotics—require stringent privacy protections and must comply with strict regulations, particularly in regions like Europe (e.g., GDPR). Centralized infrastructures struggle to support secure, privacy-preserving AI collaboration, restricting data sharing and stifling innovation in regulated or sensitive sectors.
Scalability & Interoperability
Robotic systems face major challenges in sharing resources, learning collaboratively, and integrating across diverse platforms and embodiments. These limitations fragment network effects and hinder rapid transfer of capabilities across different robot types.
AI Robotics x Web3: Structural Solutions Driving Investable Opportunities
Web3 technologies fundamentally address these pain points by enabling decentralized, verifiable, privacy-preserving, and collaborative robotic networks. This convergence is opening new, investable markets:
Democratized collaborative development: Incentive-driven networks where robots share data and collaboratively develop models and intelligent agents
- Verifiable Provenance & Accountability: Blockchain ensures immutable records of data/model lineage, robot identity, and operational history - critical for trust and compliance.
- Privacy-preserving collaboration: Advanced cryptographic solutions enable robots to jointly train models and share insights without exposing proprietary or sensitive data
- Community-driven governance: Decentralized autonomous organizations (DAOs) create transparent, inclusive on-chain rules and policies to guide and monitor robotic operations
- Cross-embodiment interoperability: Open, blockchain-based frameworks enable seamless coordination across diverse robotic platforms, reducing development costs and accelerating capability transfer
- Autonomous Agent Economies: Web3 infrastructure empowers robots as independent economic agents, conducting peer-to-peer transactions, negotiating, and participating in tokenized marketplaces without human intervention
Decentralized physical infrastructure networks (DePIN): Blockchain-based, peer-to-peer sharing of compute, sensing, storage, and connectivity resources enhances the scalability and resilience of robotic networks
Below are a few emerging projects that exemplify the innovation and momentum shaping this field. As always, this is for informational purposes only and should not be considered financial advice.
Decentralized Data & Model Development
Web3-powered platforms democratize these processes by incentivizing contributors - whether through motion-capture suits, sensor sharing, visual uploads, annotation, or even synthetic data generation for simulation and model training. This approach enables the creation of richer, more diverse, and representative datasets and models, far beyond what any single company could achieve. Decentralized frameworks also improve edge-case coverage, critical for robotics in unpredictable environments.
Example:
Frodobots: A protocol for crowdsourcing real-world datasets through robotic gaming. They launched Earth Rovers, a sidewalk robot, and a global “Drive to Earn” game. Through this initiative, they successfully created the FrodoBots 2K Dataset: a diverse collection of camera footage, GPS data, audio recordings, and human control data, collected from ~2,000 hours of tele-operated sidewalk robots driving across 10+ cities.
- BitRobot: co-developed by FrodoBots Lab and Protocol Labs, is a crypto-incentivized platform built on Solana with a subnet-based architecture. Designed to foster global collaboration and open-source innovation in robotics and AI, BitRobot structures each subnet as an open challenge. Contributors can submit models or data to earn token rewards, incentivizing active participation and continuous improvement.
- Reborn Network: A foundational layer for the open ecosystem of AGI robots. Reborn offers the Rebocap motion-capture suit, enabling anyone to record and monetize their real-world movements. This approach helps create open datasets essential for advancing complex humanoid robotics.
PrismaX: A decentralized infrastructure ensuring data diversity and authenticity by leveraging a global community of contributors. It implements robust validation and incentive mechanisms for large-scale visual data, enabling robotics datasets to scale effectively.
Proof of Provenance and Reliability
Blockchain technology delivers end-to-end transparency and accountability across the robotics ecosystem. It ensures verifiable provenance for data and models, authenticates robot identities and physical locations, and maintains a clear record of operational history and contributor involvement. Additionally, collaborative verification, on-chain reputation systems, and stake-based validation uphold data and model quality, safeguarding the ecosystem from low-quality or fraudulent inputs.
Example:
OpenLedger: An AI-blockchain infrastructure for training and deploying specialized models using community-owned datasets. It leverages Proof of Attribution to ensure quality data contributors are fairly rewarded.
Tokenized Ownership, Licensing, and Monetization
Web3-native IP tools enable tokenized licensing of specialized datasets, robotic capabilities, models, and intelligent agents. Contributors can embed licensing terms directly into their assets using smart contracts, ensuring automatic royalty payments whenever data or models are reused or monetized. This approach facilitates transparent, permissionless access and fosters open, equitable markets for robotics data and models.
Example:
Poseidon: A full-stack decentralized data layer, built on the IP-centric Story Protocol and incubated by Story team, designed to provide legally licensed training data for AI.
Privacy-Preserving Solutions
High-value data, such as that generated in hospitals, hotel rooms, or homes, is difficult to obtain through public sources but carries rich context that can significantly enhance foundation model performance. Transforming private data into on-chain assets with cryptographic solutions makes it trackable, composable, and monetizable while preserving privacy. Technologies such as Trusted Execution Environments (TEEs) and Zero-Knowledge Proofs (ZKPs) enable secure computation and result verification without exposing raw data. Leveraging these tools allows organizations to train AI models on sensitive, distributed datasets while maintaining privacy and regulatory compliance.
Example:
Phala Network: Allows developers to deploy applications into secure TEEs for confidential AI and data processing.
Open and Accountable Governance
Robot training frequently relies on proprietary, black-box systems that lack transparency and adaptability. Transparent and verifiable governance is crucial for mitigating risks and fostering trust among users, regulators, and enterprises. Web3 technologies enable on-chain, community-driven oversight and collaborative development of open-source robotic intelligence.
Example:
Openmind: An open AI native software stack that lets robots think, learn and work together. They recently proposed the ERC7777 standard with the aim to establish a verifiable, rule-based robot ecosystem focused on security, transparency, and scalability. It defines standardized interfaces for managing human and robot identities, enforcing societal rule sets, and governing the registration and removal of participants, defining their associated rights and responsibilities.
Closing Thought
As we look ahead, the convergence of AI robotics, and Web3 is ushering in a new era of autonomous systems capable of large-scale collaboration and adaptation. With rapid advances in hardware, the next 3–5 years will be critical for developing more capable AI models powered by richer real-world datasets and decentralized coordination. We anticipate the rise of specialized AI agents across industries such as hospitality, logistics, and beyond, creating substantial new market opportunities.
However, while we’re excited about AI robotics-crypto convergence, this transition also brings challenges. Designing balanced and effective incentive mechanisms remains complex and is still evolving, as systems must fairly reward contributors while preventing exploitation. Technical complexity is another concern, requiring robust and scalable solutions to integrate diverse robot embodiments seamlessly. Privacy-preserving solutions must be truly reliable to earn stakeholder trust, especially when handling sensitive data. Additionally, the regulatory landscape is rapidly changing, necessitating careful navigation to ensure compliance across jurisdictions. Addressing these risks and generating sustainable returns is essential to ensuring sustainable progress and widespread adoption.
Let’s stay engaged and closely follow these developments - by working together, we can help drive progress and seize the promising opportunities arising in this rapidly expanding market.
Innovation in robotics is a journey best traveled together :)
Finally, I would like to thank Chain of Thought’s Robotics & The Age of Physical AI for providing valuable insights that supported my research.
Disclaimer:
- This article is reprinted from [merakiki.eth]. All copyrights belong to the original author [@merakikieth">merakiki]. If there are objections to this reprint, please contact the Gate Learn team, and they will handle it promptly.
- Liability Disclaimer: The views and opinions expressed in this article are solely those of the author and do not constitute any investment advice.
- Translations of the article into other languages are done by the Gate Learn team. Unless mentioned, copying, distributing, or plagiarizing the translated articles is prohibited.